Момент инерции сечения кольца. Моменты инерции простых сечений. Осевые моменты инерции прямоугольного треугольника
ОПРЕДЕЛЕНИЕ
Осевым (или экваториальным) моментом инерции сечения относительно оси называется величина, которую определяют как:
Выражение (1) обозначает, для вычисления осевого момента инерции берется по всей площади S сумма произведений бесконечно малых площадок () умноженных на квадраты расстояний от них до оси вращения:
Сумма осевых моментов инерции сечения относительно взаимно перпендикулярных осей (например, относительно осей X и Y в декартовой системе координат) дают полярный момент инерции () относительно точки пересечения этих осей:
ОПРЕДЕЛЕНИЕ
Полярным моментом инерции называют момент инерции сечением по отношению к некоторой точке.
Осевые моменты инерции всегда больше нуля, так как в их определениях (1) под знаком интеграла стоят величина площади элементарной площадки (), всегда положительная и квадрат расстояния от этой площадки до оси.
Если мы имеем дело с сечением сложной формы, то часто при расчетах используют то, что осевой момент инерции сложного сечения по отношению к оси равен сумме осевых моментов инерции частей этого сечения относительно той же оси. Однако следует помнить, что нельзя суммировать моменты инерции, которые найдены относительно разных осей и точек.
Осевой момент инерции относительно оси проходящей через центр тяжести сечения имеет наименьшее значение из всех моментов относительно параллельных с ней осей. Момент инерции относительно любой оси () при условии ее параллельности с осью, проходящей через центр тяжести равен:
где - момент инерции сечения относительно оси проходящей через центр тяжести сечения; - площадь сечения; - расстояние между осями.
Примеры решения задач
ПРИМЕР 1
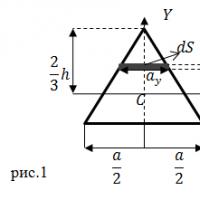
| Задание | Чему равен осевой момент инерции равнобедренного треугольного сечения относительно оси Z, проходящей через центр тяжести () треугольника, параллельно его основанию? Высота треугольника равна .
|
| Решение | Выделим на треугольном сечении прямоугольную элементарную площадку (см. рис.1). Она находится на расстоянии от оси вращения, длина одной ее стороны , другая сторона . Из рис.1 следует, что:
Площадь выделенного прямоугольника с учетом (1.1) равна: Для нахождения осевого момента инерции используем его определение в виде: |
| Ответ |


ПРИМЕР 2
| Задание | Найдите осевые моменты инерции относительно перпендикулярных осей X и Y (рис.2) сечения в виде круга диаметр которого равен d.
|
| Решение | Для решения задачи удобнее начать с нахождения полярного момента относительно центра сечения (). Все сечение разобьем на бесконечно тонкие кольца толщиной , радиус которых обозначим . Тогда элементарную площадь найдем как: |

Для простых сечений статические моменты и моменты инерции находятся по формулам (2.1)-(2.4) с помощью интегрирования. Рассмотрим, например, вычисление осевого момента инерции J x для произвольного сечения, изображенного на рис. 2.9. Учитывая, что в прямоугольной системе координат элемент площади dF=dxdy, получим
гдех^(у) и х в (у) - координаты точек контура при некотором фиксированном значении у.
Выполняя интегрирование по х, найдем

Величина Ь(у) представляет собой ширину сечения на уровне у (см. рис. 2.9), а произведение b(y)dy = dF - площадь заштрихованной элементарной полосы, параллельной оси Ох. С учетом этого формула для / преобразуется к виду

Аналогичное выражение можно получить для момента инерции J y .
Прямоугольник. Найдем моменты инерции относительно главных центральных осей, которые в соответствии со свойством 2 (§ 2.5) совпадают с осями симметрии прямоугольника (рис. 2.10). Так как ширина сечения постоянна, то по формуле (2.14) получим

Момент инерции относительно оси О х х х
определим по первой из формул (2.6):



Моменты инерции / и J находятся аналогично. Запишем формулы для осевых моментов инерции прямоугольника:
Произвольный треугольник. Вначале найдем момент инерции относительно оси 0 { x v проходящей через основание треугольника (рис. 2.11). Ширина сечения Ь(у {) на уровне у { находится из подобия треугольников:

Подставляя эту величину в формулу (2.14) и производя интегрирование, получим

Моменты относительно осей Ох и 0 2 х 2 , параллельных основанию и проходящих соответственно через центр тяжести и через вершину треугольника, находим с помощью формул (2.6):

В этих формулах b { =h/ 3 и b 2 = -2h /3 - соответственно ординаты центра тяжести треугольника О в системе координат О х х 1 у 1 и 0 2 х 2 у т


1 ° 2 р Г* аУ 1
ТЛ П *2
г >4 ™ _ °21
Д__V_!_*_ / ^ *3
V XV* ;-7^Лт^
U_ У-_XI - UZ__у
О, | ь *, 0 Ь/ Ъ 2%*1
Рис. 2.11 Рис. 2.12
Запишем формулы для осевых моментов инерции треугольника относительно осей, параллельных основанию:
Прямоугольный и равнобедренный треугольники. Для прямоугольного треугольника (рис. 2.12) определим центробежный момент инерции J относительно центральных осей Ох и Оу, параллельных катетам. Это можно сделать, воспользовавшись формулой (2.3). Однако решение задачи можно упростить, если применить следующий прием. С помощью медианы 0 { 0 3 разделим заданный треугольник на два равнобедренных треугольника 0 { 0 3 А и Ofi 3 B. Оси 0 3 х 3 и 0 3 у 3 являются осями симметрии для этих треугольников и на основании свойства 2 (§ 2.5) будут главными осями каждого из них по отдельности, а следовательно, и всего треугольника О х АВ. Поэтому центробежный момент инерции J =0. Центробеж-
ный момент треугольника относительно осей Ох и Оу найдем с помощью последней из формул (2.6):
Запишем формулы для моментов инерции прямоугольного треугольника:




Момент инерции равнобедренного треугольника относительно оси симметрии Оу (рис. 2.13) определим, используя четвертую из формул (2.17), как удвоенный момент инерции прямоугольного треугольника с основанием h и высотой Ь/ 2:

Таким образом, моменты инерции равнобедренного треугольника относительно главных центральных осей Ох и Оу определяются по формулам
Круг. Вначале удобно вычислить полярный момент инерции круга по формуле (2.4), воспользовавшись полярной системой координат (рис. 2.14).
Учитывая, что dF-rdrdQ, найдем

Поскольку полярный момент согласно (2.4) равен сумме двух осевых моментов, получим
Кольцо. Моменты инерции кольца (рис. 2.15) находятся как разность моментов инерции двух кругов с радиусами Я 2 и R { :
Полукруг (рис. 2.16). Выделим в плоскости полукруга элемент площади dF с полярными координатами г, 0 и декартовыми координатами x v y v для которых в соответствии с рис. 2.16 имеем:
По формулам (2.1) и (2.5) найдем соответственно статический момент полукруга относительно оси 0 { х { и ординату у 0 центра тяжести О в системе координат 0 { х { Уу

Относительно осей 0,х, и 0 { y v которые являются главными осями для полукруга, осевые моменты инерции равны половине моментов инерции круга:

Момент инерции относительно главной центральной оси определяется с помощью первой формулы (2.6):
Эллипс. Для вычисления осевого момента инерции эллипса с полуосями а и b относительно оси Ох (рис. 2.17) поступим следующим образом. Вокруг эллипса опишем окружность и выделим две элементарные полосы шириной dx и высотой 2у к для круга и 2у э для эллипса. Моменты инерции этих двух полос можно определить по первой из формул (2.15) для прямоугольника:
Интегрируя эти выражения в пределах от -а
до а,
получим


Рис. 2.16

Рис. 2.17
Из уравнений окружности и эллипса имеем

С учетом этого

Аналогичное выражение можно получить для момента инерции относительно оси Оу. В результате для эллипса будем иметь следующие формулы для осевых моментов:
Прокатные стержни. Геометрические характеристики сечений прокатных стержней (двутавры, швеллеры, уголки) приведены в таблицах сортамента прокатной стали (см. приложение).
Тела m на квадрат расстояния d между осями :
J = J c + m d 2 , {\displaystyle J=J_{c}+md^{2},}где m - полная масса тела.
Например, момент инерции стержня относительно оси, проходящей через его конец, равен:
J = J c + m d 2 = 1 12 m l 2 + m (l 2) 2 = 1 3 m l 2 . {\displaystyle J=J_{c}+md^{2}={\frac {1}{12}}ml^{2}+m\left({\frac {l}{2}}\right)^{2}={\frac {1}{3}}ml^{2}.}Осевые моменты инерции некоторых тел
| Тело | Описание | Положение оси a | Момент инерции J a |
|---|---|---|---|
| Материальная точка массы m | На расстоянии r от точки, неподвижная | ||
| Полый тонкостенный цилиндр или кольцо радиуса r и массы m | Ось цилиндра | m r 2 {\displaystyle mr^{2}} | |
| Сплошной цилиндр или диск радиуса r и массы m | Ось цилиндра | 1 2 m r 2 {\displaystyle {\frac {1}{2}}mr^{2}} | |
| Полый толстостенный цилиндр массы m с внешним радиусом r 2 и внутренним радиусом r 1 | Ось цилиндра | m r 2 2 + r 1 2 2 {\displaystyle m{\frac {r_{2}^{2}+r_{1}^{2}}{2}}} | |
| Сплошной цилиндр длины l , радиуса r и массы m | 1 4 m ⋅ r 2 + 1 12 m ⋅ l 2 {\displaystyle {1 \over 4}m\cdot r^{2}+{1 \over 12}m\cdot l^{2}} | ||
| Полый тонкостенный цилиндр (кольцо) длины l , радиуса r и массы m | Ось перпендикулярна к цилиндру и проходит через его центр масс | 1 2 m ⋅ r 2 + 1 12 m ⋅ l 2 {\displaystyle {1 \over 2}m\cdot r^{2}+{1 \over 12}m\cdot l^{2}} | |
| Прямой тонкий стержень длины l и массы m | Ось перпендикулярна к стержню и проходит через его центр масс | 1 12 m l 2 {\displaystyle {\frac {1}{12}}ml^{2}} | |
| Прямой тонкий стержень длины l и массы m | Ось перпендикулярна к стержню и проходит через его конец | 1 3 m l 2 {\displaystyle {\frac {1}{3}}ml^{2}} | |
| Тонкостенная сфера радиуса r и массы m | Ось проходит через центр сферы | 2 3 m r 2 {\displaystyle {\frac {2}{3}}mr^{2}} | |
| Шар радиуса r и массы m | Ось проходит через центр шара | 2 5 m r 2 {\displaystyle {\frac {2}{5}}mr^{2}} | |
| Конус радиуса r и массы m | Ось конуса | 3 10 m r 2 {\displaystyle {\frac {3}{10}}mr^{2}} | |
| Равнобедренный треугольник с высотой h , основанием a и массой m | Ось перпендикулярна плоскости треугольника и проходит через вершину | 1 24 m (a 2 + 12 h 2) {\displaystyle {\frac {1}{24}}m(a^{2}+12h^{2})} | |
| Правильный треугольник со стороной a и массой m | Ось перпендикулярна плоскости треугольника и проходит через центр масс | 1 12 m a 2 {\displaystyle {\frac {1}{12}}ma^{2}} | |
| Квадрат со стороной a и массой m | Ось перпендикулярна плоскости квадрата и проходит через центр масс | 1 6 m a 2 {\displaystyle {\frac {1}{6}}ma^{2}} | |
| Прямоугольник со сторонами a и b и массой m | Ось перпендикулярна плоскости прямоугольника и проходит через центр масс | 1 12 m (a 2 + b 2) {\displaystyle {\frac {1}{12}}m(a^{2}+b^{2})} | |
| Правильный n-угольник радиуса r и массой m | Ось перпендикулярна плоскости и проходит через центр масс | m r 2 6 [ 1 + 2 cos (π / n) 2 ] {\displaystyle {\frac {mr^{2}}{6}}\left} | |
| Тор (полый) с радиусом направляющей окружности R , радиусом образующей окружности r и массой m | Ось перпендикулярна плоскости направляющей окружности тора и проходит через центр масс | I = m (3 4 r 2 + R 2) {\displaystyle I=m\left({\frac {3}{4}}\,r^{2}+R^{2}\right)} |
Вывод формул
Тонкостенный цилиндр (кольцо, обруч)
Вывод формулы
Момент инерции тела равен сумме моментов инерции составляющих его частей. Разобьём тонкостенный цилиндр на элементы с массой dm и моментами инерции dJ i . Тогда
J = ∑ d J i = ∑ R i 2 d m . (1) . {\displaystyle J=\sum dJ_{i}=\sum R_{i}^{2}dm.\qquad (1).}Поскольку все элементы тонкостенного цилиндра находятся на одинаковом расстоянии от оси вращения, формула (1) преобразуется к виду
J = ∑ R 2 d m = R 2 ∑ d m = m R 2 . {\displaystyle J=\sum R^{2}dm=R^{2}\sum dm=mR^{2}.}Толстостенный цилиндр (кольцо, обруч)
Вывод формулы
Пусть имеется однородное кольцо с внешним радиусом R , внутренним радиусом R 1 , толщиной h и плотностью ρ . Разобьём его на тонкие кольца толщиной dr . Масса и момент инерции тонкого кольца радиуса r составит
d m = ρ d V = ρ ⋅ 2 π r h d r ; d J = r 2 d m = 2 π ρ h r 3 d r . {\displaystyle dm=\rho dV=\rho \cdot 2\pi rhdr;\qquad dJ=r^{2}dm=2\pi \rho hr^{3}dr.}Момент инерции толстого кольца найдём как интеграл
J = ∫ R 1 R d J = 2 π ρ h ∫ R 1 R r 3 d r = {\displaystyle J=\int _{R_{1}}^{R}dJ=2\pi \rho h\int _{R_{1}}^{R}r^{3}dr=} = 2 π ρ h r 4 4 | R 1 R = 1 2 π ρ h (R 4 − R 1 4) = 1 2 π ρ h (R 2 − R 1 2) (R 2 + R 1 2) . {\displaystyle =2\pi \rho h\left.{\frac {r^{4}}{4}}\right|_{R_{1}}^{R}={\frac {1}{2}}\pi \rho h\left(R^{4}-R_{1}^{4}\right)={\frac {1}{2}}\pi \rho h\left(R^{2}-R_{1}^{2}\right)\left(R^{2}+R_{1}^{2}\right).}Поскольку объём и масса кольца равны
V = π (R 2 − R 1 2) h ; m = ρ V = π ρ (R 2 − R 1 2) h , {\displaystyle V=\pi \left(R^{2}-R_{1}^{2}\right)h;\qquad m=\rho V=\pi \rho \left(R^{2}-R_{1}^{2}\right)h,}получаем окончательную формулу для момента инерции кольца
J = 1 2 m (R 2 + R 1 2) . {\displaystyle J={\frac {1}{2}}m\left(R^{2}+R_{1}^{2}\right).}Однородный диск (сплошной цилиндр)
Вывод формулы
Рассматривая цилиндр (диск) как кольцо с нулевым внутренним радиусом (R 1 = 0 ), получим формулу для момента инерции цилиндра (диска):
J = 1 2 m R 2 . {\displaystyle J={\frac {1}{2}}mR^{2}.}Сплошной конус
Вывод формулы
Разобьём конус на тонкие диски толщиной dh , перпендикулярные оси конуса. Радиус такого диска равен
r = R h H , {\displaystyle r={\frac {Rh}{H}},}где R – радиус основания конуса, H – высота конуса, h – расстояние от вершины конуса до диска. Масса и момент инерции такого диска составят
d J = 1 2 r 2 d m = 1 2 π ρ r 4 d h = 1 2 π ρ (R h H) 4 d h ; {\displaystyle dJ={\frac {1}{2}}r^{2}dm={\frac {1}{2}}\pi \rho r^{4}dh={\frac {1}{2}}\pi \rho \left({\frac {Rh}{H}}\right)^{4}dh;}Интегрируя, получим
J = ∫ 0 H d J = 1 2 π ρ (R H) 4 ∫ 0 H h 4 d h = 1 2 π ρ (R H) 4 h 5 5 | 0 H == 1 10 π ρ R 4 H = (ρ ⋅ 1 3 π R 2 H) 3 10 R 2 = 3 10 m R 2 . {\displaystyle {\begin{aligned}J=\int _{0}^{H}dJ={\frac {1}{2}}\pi \rho \left({\frac {R}{H}}\right)^{4}\int _{0}^{H}h^{4}dh={\frac {1}{2}}\pi \rho \left({\frac {R}{H}}\right)^{4}\left.{\frac {h^{5}}{5}}\right|_{0}^{H}=={\frac {1}{10}}\pi \rho R^{4}H=\left(\rho \cdot {\frac {1}{3}}\pi R^{2}H\right){\frac {3}{10}}R^{2}={\frac {3}{10}}mR^{2}.\end{aligned}}}Сплошной однородный шар
Вывод формулы
Разобьём шар на тонкие диски толщиной dh , перпендикулярные оси вращения. Радиус такого диска, расположенного на высоте h от центра сферы, найдём по формуле
r = R 2 − h 2 . {\displaystyle r={\sqrt {R^{2}-h^{2}}}.}Масса и момент инерции такого диска составят
d m = ρ d V = ρ ⋅ π r 2 d h ; {\displaystyle dm=\rho dV=\rho \cdot \pi r^{2}dh;} d J = 1 2 r 2 d m = 1 2 π ρ r 4 d h = 1 2 π ρ (R 2 − h 2) 2 d h = 1 2 π ρ (R 4 − 2 R 2 h 2 + h 4) d h . {\displaystyle dJ={\frac {1}{2}}r^{2}dm={\frac {1}{2}}\pi \rho r^{4}dh={\frac {1}{2}}\pi \rho \left(R^{2}-h^{2}\right)^{2}dh={\frac {1}{2}}\pi \rho \left(R^{4}-2R^{2}h^{2}+h^{4}\right)dh.}Момент инерции шара найдём интегрированием:
J = ∫ − R R d J = 2 ∫ 0 R d J = π ρ ∫ 0 R (R 4 − 2 R 2 h 2 + h 4) d h = = π ρ (R 4 h − 2 3 R 2 h 3 + 1 5 h 5) | 0 R = π ρ (R 5 − 2 3 R 5 + 1 5 R 5) = 8 15 π ρ R 5 = = (4 3 π R 3 ρ) ⋅ 2 5 R 2 = 2 5 m R 2 . {\displaystyle {\begin{aligned}J&=\int _{-R}^{R}dJ=2\int _{0}^{R}dJ=\pi \rho \int _{0}^{R}\left(R^{4}-2R^{2}h^{2}+h^{4}\right)dh=\\&=\pi \rho \left.\left(R^{4}h-{\frac {2}{3}}R^{2}h^{3}+{\frac {1}{5}}h^{5}\right)\right|_{0}^{R}=\pi \rho \left(R^{5}-{\frac {2}{3}}R^{5}+{\frac {1}{5}}R^{5}\right)={\frac {8}{15}}\pi \rho R^{5}=\\&=\left({\frac {4}{3}}\pi R^{3}\rho \right)\cdot {\frac {2}{5}}R^{2}={\frac {2}{5}}mR^{2}.\end{aligned}}}Тонкостенная сфера
Вывод формулы
Для вывода воспользуемся формулой момента инерции однородного шара радиуса R :
J 0 = 2 5 M R 2 = 8 15 π ρ R 5 . {\displaystyle J_{0}={\frac {2}{5}}MR^{2}={\frac {8}{15}}\pi \rho R^{5}.}Вычислим, насколько изменится момент инерции шара, если при неизменной плотности ρ его радиус увеличится на бесконечно малую величину dR .
J = d J 0 d R d R = d d R (8 15 π ρ R 5) d R = = 8 3 π ρ R 4 d R = (ρ ⋅ 4 π R 2 d R) 2 3 R 2 = 2 3 m R 2 . {\displaystyle {\begin{aligned}J&={\frac {dJ_{0}}{dR}}dR={\frac {d}{dR}}\left({\frac {8}{15}}\pi \rho R^{5}\right)dR=\\&={\frac {8}{3}}\pi \rho R^{4}dR=\left(\rho \cdot 4\pi R^{2}dR\right){\frac {2}{3}}R^{2}={\frac {2}{3}}mR^{2}.\end{aligned}}}Тонкий стержень (ось проходит через центр)
Вывод формулы
Разобьём стержень на малые фрагменты длиной dr . Масса и момент инерции такого фрагмента равна
d m = m d r l ; d J = r 2 d m = m r 2 d r l . {\displaystyle dm={\frac {mdr}{l}};\qquad dJ=r^{2}dm={\frac {mr^{2}dr}{l}}.}Интегрируя, получим
J = ∫ − l / 2 l / 2 d J = 2 ∫ 0 l / 2 d J = 2 m l ∫ 0 l / 2 r 2 d r = 2 m l r 3 3 | 0 l / 2 = 2 m l l 3 24 = 1 12 m l 2 . {\displaystyle J=\int _{-l/2}^{l/2}dJ=2\int _{0}^{l/2}dJ={\frac {2m}{l}}\int _{0}^{l/2}r^{2}dr={\frac {2m}{l}}\left.{\frac {r^{3}}{3}}\right|_{0}^{l/2}={\frac {2m}{l}}{\frac {l^{3}}{24}}={\frac {1}{12}}ml^{2}.}Тонкий стержень (ось проходит через конец)
Вывод формулы
При перемещении оси вращения из середины стержня на его конец, центр тяжести стержня перемещается относительно оси на расстояние l ⁄ 2 . По теореме Штейнера новый момент инерции будет равен
J = J 0 + m r 2 = J 0 + m (l 2) 2 = 1 12 m l 2 + 1 4 m l 2 = 1 3 m l 2 . {\displaystyle J=J_{0}+mr^{2}=J_{0}+m\left({\frac {l}{2}}\right)^{2}={\frac {1}{12}}ml^{2}+{\frac {1}{4}}ml^{2}={\frac {1}{3}}ml^{2}.}Безразмерные моменты инерции планет и спутников
Большое значение для исследований внутренней структуры планет и их спутников имеют их безразмерные моменты инерции. Безразмерный момент инерции тела радиуса r и массы m равен отношению его момента инерции относительно оси вращения к моменту инерции материальной точки той же массы относительно неподвижной оси вращения, расположенной на расстоянии r (равному mr 2 ). Эта величина отражает распределение массы по глубине. Одним из методов её измерения у планет и спутников является определение доплеровского смещения радиосигнала, передаваемого АМС , пролетающей около данной планеты или спутника. Для тонкостенной сферы безразмерный момент инерции равен 2/3 (~0,67), для однородного шара - 0,4, и вообще тем меньше, чем большая масса тела сосредоточена у его центра. Например, у Луны безразмерный момент инерции близок к 0,4 (равен 0,391), поэтому предполагают, что она относительно однородна, её плотность с глубиной меняется мало. Безразмерный момент инерции Земли меньше, чем у однородного шара (равен 0,335), что является аргументом в пользу существования у неё плотного ядра .
Центробежный момент инерции
Центробежными моментами инерции тела по отношению к осям прямоугольной декартовой системы координат называются следующие величины :
J x y = ∫ (m) x y d m = ∫ (V) x y ρ d V , {\displaystyle J_{xy}=\int \limits _{(m)}xydm=\int \limits _{(V)}xy\rho dV,} J x z = ∫ (m) x z d m = ∫ (V) x z ρ d V , {\displaystyle J_{xz}=\int \limits _{(m)}xzdm=\int \limits _{(V)}xz\rho dV,} J y z = ∫ (m) y z d m = ∫ (V) y z ρ d V , {\displaystyle J_{yz}=\int \limits _{(m)}yzdm=\int \limits _{(V)}yz\rho dV,}где x , y и z - координаты малого элемента тела объёмом dV , плотностью ρ и массой dm .
Ось OX называется главной осью инерции тела , если центробежные моменты инерции J xy и J xz одновременно равны нулю. Через каждую точку тела можно провести три главные оси инерции. Эти оси взаимно перпендикулярны друг другу. Моменты инерции тела относительно трёх главных осей инерции, проведённых в произвольной точке O тела, называются главными моментами инерции данного тела .
Главные оси инерции, проходящие через центр масс тела, называются главными центральными осями инерции тела , а моменты инерции относительно этих осей - его главными центральными моментами инерции . Ось симметрии однородного тела всегда является одной из его главных центральных осей инерции .
Геометрические моменты инерции
Геометрический момент инерции объёма
J V a = ∫ (V) r 2 d V , {\displaystyle J_{Va}=\int \limits _{(V)}r^{2}dV,}где, как и ранее r - расстояние от элемента dV до оси a .
Геометрический момент инерции площади относительно оси - геометрическая характеристика тела, выражаемая формулой :
J S a = ∫ (S) r 2 d S , {\displaystyle J_{Sa}=\int \limits _{(S)}r^{2}dS,}где интегрирование выполняется по поверхности S , а dS - элемент этой поверхности.
Размерность J Sa - длина в четвёртой степени ( d i m J S a = L 4 {\displaystyle \mathrm {dim} J_{Sa}=\mathrm {L^{4}} } ), соответственно единица измерения СИ - 4 . В строительных расчетах, литературе и сортаментах металлопроката часто указывается в см 4 .
Через геометрический момент инерции площади выражается момент сопротивления сечения:
W = J S a r m a x . {\displaystyle W={\frac {J_{Sa}}{r_{max}}}.}Здесь r max - максимальное расстояние от поверхности до оси.
| Геометрические моменты инерции площади некоторых фигур | |
|---|---|
| Прямоугольника высотой h {\displaystyle h} и шириной b {\displaystyle b} : |
J
y
=
b
h
3
12
{\displaystyle J_{y}={\frac {bh^{3}}{12}}}
J z = h b 3 12 {\displaystyle J_{z}={\frac {hb^{3}}{12}}} |
| Прямоугольного коробчатого сечения высотой и шириной по внешним контурам H {\displaystyle H} и B {\displaystyle B} , а по внутренним h {\displaystyle h} и b {\displaystyle b} соответственно |
J
z
=
B
H
3
12
−
b
h
3
12
=
1
12
(B
H
3
−
b
h
3)
{\displaystyle J_{z}={\frac {BH^{3}}{12}}-{\frac {bh^{3}}{12}}={\frac {1}{12}}(BH^{3}-bh^{3})}
J y = H B 3 12 − h b 3 12 = 1 12 (H B 3 − h b 3) {\displaystyle J_{y}={\frac {HB^{3}}{12}}-{\frac {hb^{3}}{12}}={\frac {1}{12}}(HB^{3}-hb^{3})} |
| Круга диаметром d {\displaystyle d} | J y = J z = π d 4 64 {\displaystyle J_{y}=J_{z}={\frac {\pi d^{4}}{64}}} |
Момент инерции относительно плоскости
Моментом инерции твёрдого тела относительно некоторой плоскости называют скалярную величину, равную сумме произведений массы каждой точки тела на квадрат расстояния от этой точки до рассматриваемой плоскости .
Если через произвольную точку O {\displaystyle O} провести координатные оси x , y , z {\displaystyle x,y,z} , то моменты инерции относительно координатных плоскостей x O y {\displaystyle xOy} , y O z {\displaystyle yOz} и z O x {\displaystyle zOx} будут выражаться формулами:
J x O y = ∑ i = 1 n m i z i 2 , {\displaystyle J_{xOy}=\sum _{i=1}^{n}m_{i}z_{i}^{2}\ ,} J y O z = ∑ i = 1 n m i x i 2 , {\displaystyle J_{yOz}=\sum _{i=1}^{n}m_{i}x_{i}^{2}\ ,} J z O x = ∑ i = 1 n m i y i 2 . {\displaystyle J_{zOx}=\sum _{i=1}^{n}m_{i}y_{i}^{2}\ .}В случае сплошного тела суммирование заменяется интегрированием.
Центральный момент инерции
Центральный момент инерции (момент инерции относительно точки O, момент инерции относительно полюса, полярный момент инерции ) J O {\displaystyle J_{O}} - это величина, определяемая выражением :
J a = ∫ (m) r 2 d m = ∫ (V) ρ r 2 d V , {\displaystyle J_{a}=\int \limits _{(m)}r^{2}dm=\int \limits _{(V)}\rho r^{2}dV,}Центральный момент инерции можно выразить через главные осевые моменты инерции, а также через моменты инерции относительно плоскостей :
J O = 1 2 (J x + J y + J z) , {\displaystyle J_{O}={\frac {1}{2}}\left(J_{x}+J_{y}+J_{z}\right),} J O = J x O y + J y O z + J x O z . {\displaystyle J_{O}=J_{xOy}+J_{yOz}+J_{xOz}.}Тензор инерции и эллипсоид инерции
Момент инерции тела относительно произвольной оси, проходящей через центр масс и имеющей направление, заданное единичным вектором s → = ‖ s x , s y , s z ‖ T , | s → | = 1 {\displaystyle {\vec {s}}=\left\Vert s_{x},s_{y},s_{z}\right\Vert ^{T},\left\vert {\vec {s}}\right\vert =1} , можно представить в виде квадратичной (билинейной) формы :
I s = s → T ⋅ J ^ ⋅ s → , {\displaystyle I_{s}={\vec {s}}^{T}\cdot {\hat {J}}\cdot {\vec {s}},\qquad } (1)где - тензор инерции . Матрица тензора инерции симметрична, имеет размеры
3
×
3
{\displaystyle 3\times 3}
и состоит из компонент центробежных моментов:
Выбором соответствующей системы координат матрица тензора инерции может быть приведена к диагональному виду. Для этого нужно решить задачу о собственных значениях для матрицы тензора
J
^
{\displaystyle {\hat {J}}}
:
где
Q
^
{\displaystyle {\hat {Q}}}
- ортогональная матрица перехода в собственный базис тензора инерции. В собственном базисе координатные оси направлены вдоль главных осей тензора инерции, а также совпадают с главными полуосями эллипсоида тензора инерции. Величины
J
X
,
J
Y
,
J
Z
{\displaystyle J_{X},J_{Y},J_{Z}}
- главные моменты инерции. Выражение (1) в собственной системе координат имеет вид:
откуда получается уравнение эллипсоида в собственных координатах. Разделив обе части уравнения на
I
s
{\displaystyle I_{s}}
и произведя замены:
ξ = s x I s , η = s y I s , ζ = s z I s , {\displaystyle \xi ={s_{x} \over {\sqrt {I_{s}}}},\eta ={s_{y} \over {\sqrt {I_{s}}}},\zeta ={s_{z} \over {\sqrt {I_{s}}}},}получаем канонический вид уравнения эллипсоида в координатах ξ η ζ {\displaystyle \xi \eta \zeta } :
ξ 2 ⋅ J X + η 2 ⋅ J Y + ζ 2 ⋅ J Z = 1. {\displaystyle \xi ^{2}\cdot J_{X}+\eta ^{2}\cdot J_{Y}+\zeta ^{2}\cdot J_{Z}=1.}Расстояние от центра эллипсоида до некоторой его точки связано со значением момента инерции тела вдоль прямой, проходящей через центр эллипсоида и эту точку.
Осевым моментом инерции называется, взятая по всему сечению сумма, произведений элементарных площадок на квадрат расстояния до некоторой оси, лежащей в плоскости рассматриваемого сечения. Величина осевого момента инерции служит характеристикой способности балки сопротивляться деформации изгиба.
J – Осевой момент инерции
J x =
J y =
Осевым моментом сопротивления называется отношение осевого момента инерции к расстоянию до наиболее удаленных от нейтральной оси волокон сечения.
W – Осевой момент сопротивления.
W x = , W у =
Полярным моментом инерции называется, взятая по всему сечению, сумма произведений элементарных площадок на квадраты их расстояний до центра тяжести сечения.т.е. до пересечения осей координат.
Полярный момент инерции характеризует способность детали сопротивляться деформации кручения.
Полярный момент инерции.
= .
.
Полярным моментом сопротивления называется отношение полярного момента инерции к расстоянию до наиболее удаленных точек сечения от центра тяжести рассматриваемого сечения.
Полярный момент сопротивления
1. Прямоугольное сечение.

J y = (мм 4), J x = (мм 4)
W x = (мм 3), W y =
(мм 3), W y =  (мм 3)
(мм 3)
2. Круглое сечение

J x = J y = (мм 4), = (мм 4)
W y = W x = (мм 3),
=
(мм 3),
= (мм 3)
(мм 3)
3. Кольцевое сечение

J x = J y = - = (мм 4)
, α=d/D
(мм 4)
, α=d/D
W y = W x = (мм 3)
(мм 3)
=  (мм 4)
(мм 4)
= (мм 3)
(мм 3)
4. Коробчатое сечение.

J x =  =
= (мм 4)
(мм 4)
J y =  =
= (мм 4)
(мм 4)
W x = (мм 3)
(мм 3)
W y =  (мм 3)
(мм 3)
Расчеты деталей при равномерном распределении напряжений.
К этому типу деталей относятся тяги с проушинами и пальцами, а так же гидро- и пневмо- цилиндры и другие сосуды, работающие под давлением, биметаллические элементы (термореле).
Расчет тяги.

1) К тяге приложено растягивающее усилие F.
Стержень тяге воспринимает продольную нагрузку, под действием которой растягивается. При этом величина абсолютного удлинения определяется по развернутому закону Гука:
σ р =Eε. , σ р =F/A,  , σ р =F/A<=[
σ р ]= σ T / n -
, σ р =F/A<=[
σ р ]= σ T / n -
условие прочности тяги при растяжении, (A=H*B, A=).
Проушины в результате взаимодействия с пальцем сминаются по площади контакта.
Условие прочности при смятии:
σ см =F/A<=[σ см ]= 2σ T / n , A=d*b.
Пальцы рассчитываются на срез от взаимодействия с проушинами:
τ ср =F/A<=[τ ср ]= 0,5σ T / n; A=*i, i - количество платежей среза (i=2).
2) К тяге приложено сжимающее усилие F2.
Стержень тяги работает на сжатие. Величина абсолютного укорочения определяется так же по закону Гука:
σ с =F/A<=[σ с ]=[σ р ]=σ T / n. – Для коротких стержней тяги.
Длинный стержень – когда длина превышает в 3 раза один из размеров поперечного сечения. Здесь существует вероятность мгновенного изгиба стержня тяги.
σ с =<=[σ с ]=[σ р ]=σ T / n, φ – коэффициент продольного изгиба, величина табличная – зависит от материала, гибкости стержня и характера закрепления концов стержня.
Проушину и пальцы рассчитывают аналогично предыдущему расчету.
Расчет тонкостенных сосудов.
К тонкостенным сосудам относятся гидро- и пневмо- цилиндры, ресиверы, трубопроводы и т.д.
В зависимости от формы сосуды бывают:
цилиндрические (гидро- и пневмо- цилиндры, некоторые типы ресиверов, трубопроводы);
шаровые (некоторые типы ресиверов, днища и крышки цилиндрических сосудов, мембраны и т.д.);
торовые (криволинейные участки трубопроводов, чувствительные элементы стрелочных манометров).
Во всех сосудах под действием внутренних сил жидкости или газа в стенках возникают напряжения в продольном и поперечном сечении.
Цилиндрические сосуды.
 Тонкая цилиндрическая оболочка нагружена внутренним
давлением Р. -
Рассчитываются как поперечное сечение цилиндра.
Тонкая цилиндрическая оболочка нагружена внутренним
давлением Р. -
Рассчитываются как поперечное сечение цилиндра.
Торовые сосуды.
Они рассчитываются как искривленные цилиндрические.
15.10.04 Расчет напряжений, возникающих при изменении температуры.

При колебаниях температуры деталь, закрепленная между жесткими опорами, испытывает деформацию сжатия или растяжения. При повышении (понижении) температуры на Dt стержень должен удлиниться (укоротиться) на величину абсолютного удлинения (укорочения):
D l = a t * l * D t , где a t – температурный коэффициент линейного расширения (для стали 12*10 -6 °С -1), тогда величина абсолютного удлинения (укорочения): Δε t = Δ l t / l = α t * D t , но т.к. стержень закреплен жестко, то он не может удлиниться (укоротиться), поэтому в его материале возникнут напряжения сжатия (растяжения), значения которых определяются по закону Гука:
σ с,р =Е*ε t =E*α t *Δt.
Моменты инерции сечения балки (бруса, стержня) относятся, как и площадь сечения, к одним из основных геометрических характеристик элемента, участвующих в расчетах на прочность. Напомню, что балкой в сопромате называется элемент, у которого один из размеров — длина...
Существенно больше двух других – ширины и высоты. Именно два последних габаритных размера плюс форма и влияют наряду со свойствами материала на прочностные характеристики балки.
Геометрические моменты инерции сечения нельзя путать с моментами инерции тел, хотя их смысл весьма схож. Момент инерции тела вокруг некоторой оси – это сумма произведений масс элементарных «объемных» точек тела на квадраты расстояний от оси до этих точек. Момент инерции сечения (плоской фигуры) — это сумма произведений площадей элементарных «плоских» точек этого сечения на квадраты расстояний от них до рассматриваемой оси.
Формулы для вычисления осевых моментов инерции, а также радиусов инерции и моментов сопротивления почти тридцати элементарных фигур, из которых можно составить любое сечение бруса, можно взять в разделе «Элементы сопротивления материалов» главы №1 «Общетехнические сведения» тома №1 «Справочника конструктора-машиностроителя» В.И. Анурьева. Этот трехтомный справочник, являющийся главной настольной книгой нескольких поколений инженеров-механиков и претерпевший около десяти переизданий, и сегодня продолжает являться востребованным и актуальным. Я думаю, он должен обязательно быть у каждого инженера, тем более что найти его в Сети – не проблема. Конечно, интересующие нас формулы можно найти и в другой справочной литературе.
Для двутавров, швеллеров, уголков, труб и прочих прокатных и гнутых профилей, широко применяемых в машиностроении и строительстве, геометрические характеристики сечений, включая моменты инерции, можно найти в таблицах ГОСТов, ОСТов и прочих нормативных документов, которые регламентируют их изготовление.
Балки и стержни, составленные из двух или более элементарных профилей, применяют для повышения прочности и жесткости элементов при отсутствии адекватной с точки зрения массы и габаритов замены одиночным профилем. На практике – это спаренные уголки, двухветвевые колонны, балки с усиленным листовой полосой поясом и другие случаи.
Геометрические характеристики составного сечения. Расчет в Excel.
В статье мы рассматривали в качестве примера составную фигуру, состоящую из треугольника и прямоугольника с вырезом в виде полукруга. Продолжим работу с этим примером. Хотя балку, имеющую столь причудливое сечение, на практике нигде и никогда, наверное, не встретишь, для не очень сложного и наглядного примера она нам подойдет!

Запускаем программу MS Excel или программу OOo Calc, и начинаем работу!
С общими правилами форматирования электронных таблиц, применяемыми в статьях блога, можно ознакомиться .
Из вышеупомянутой статьи мы уже знаем координаты центров тяжести, площади элементов сечения и площадь всего составного сечения. В этой статье продолжим начатую работу, и выполним расчет других геометрических характеристик.
Исходные данные:
Пункты 1 , 2 , 3 копируем из файла и заполняем диапазон ячеек D3:F6.
4. Рассчитаем осевые и центробежные моменты инерции элементов относительно собственных центральных осей Ixi , Iyi , Ixiyi в см4, воспользовавшись формулами из «Справочника конструктора-машиностроителя» В.И. Анурьева
в ячейке D7: =80*40^3/12/10000 =42,667
Ix 1 = a 1 *(b 1 ^3)/12
в ячейке D8: =40*80^3/12/10000 =170,667
Iy1 = b1 *(a1 ^3)/12
в ячейке D9: =0 =0,000
Ix 1 y 1 = 0 (элемент с осевой симметрией)
в ячейке E7: =24*42^3/36/10000 =4,939
Ix 2 = a 2 *(h 2 ^3)/36
в ячейке E8: =42*24^3/48/10000 =1,210
Iy 2 = h 2 *(a 2 ^3)/48
в ячейке E9: =0 =0,000
Ix 2 y 2 = 0 (элемент с осевой симметрией)
в ячейке F7: =- (ПИ()/8*26^4-8/9/ПИ()*26^4)/10000 =-5,016
Ix 3 =- (π /8)*(r 3 ^4) — (8/(9* π ))*(r 3 ^4)
в ячейке F8: =-ПИ()/8*26^4/10000 =-17,945
Iy 3 =- (π /8)*(r 3 ^4)
в ячейке F9: =0 =0,000
Ix 3 y 3 = 0 (элемент с осевой симметрией)
Осевые моменты инерции третьего элемента – полукруга – отрицательны потому, что это вырез в прямоугольнике – пустое место!

Расчет геометрических характеристик:
Пункты 5 , 6 , 7 копируем из файла и заполняем объединенные ячейки D11E11F11…D15E15F15.
8. Рассчитаем осевые и центробежный моменты инерции сечения относительно центральных осей x0 и y0, проведенных через центр тяжести Ix 0 , Iy 0 , Ix 0 y 0 в см4
в объединенной ячейке D16E16F16: =((D5-D15)^2*D6+(E5-D15)^2*E6+(F5-D15)^2*F6)/10000+D7+E7+F7 =90,122
Ix 0 = Σ ((yci — Yc )^2* Fi )+ ΣIxi
в объединенной ячейке D17E17F17: =((D4-D14)^2*D6+(E4-D14)^2*E6+(F4-D14)^2*F6)/10000+D8+E8+F8 =159,678
Iy 0 = Σ ((xci — Xc )^2* Fi )+ ΣIyi
в объединенной ячейке D18E18F18: =((D5-D15)*(D4-D14)*D6+(E5-D15)*(E4-D14)*E6+(F5-D15)*(F4-D14)*F6)/10000+D9+E9+F9 =-50,372
Ix0y0 = Σ ((yci -Yc )*(xci -Xc )*Fi )+ Σ Ixiyi
9. Вычислим главные центральные моменты инерции сечения Iv и Iu в cм4
в объединенной ячейке D19E19F19: =($D$16+$D$17)/2+((($D$16-$D$17)/2)^2+$D$18^2)^0,5 =186,111
Iv =(Ix0 +Iy0 )/2+(((Ix0 -Iy0 )/2)^2+Ix0y0 ^2)^0,5
в объединенной ячейке D20E20F20: =($D$16+$D$17)/2- ((($D$16-$D$17)/2)^2+$D$18^2)^0,5 =63,689
Iu =(Ix0 +Iy0 )/2- (((Ix0 -Iy0 )/2)^2+Ix0y0 ^2)^0,5
10. Найдем угол наклона главной оси v к центральной оси x0 α в градусах
в объединенной ячейке D21E21F21: =ATAN (D18/(D20-D16))/ПИ()*180 =62,311
α =arctg (Ix0y0 /(Iu -Ix0 ))
11. И в заключении вычислим радиусы инерции составного сечения iv и iu в мм
в объединенной ячейке D22E22F22: =(D19*10000/D11)^0,5 =26,540
iv =(Iv / F 0 )^0,5
в объединенной ячейке D23E23F23: =(D20*10000/D11)^0,5 =15,526
iu =(Iu / F 0 )^0,5
Задача выполнена – вычислены моменты инерции и радиусы инерции составного сечения из трех простых элементов! Получены все необходимые данные для построения эллипса инерции.
Файл Excel с расчетной программой позволяет легко выполнить полный расчет геометрических характеристик поперечного сечения балки, состоящего из двух или трех простых элементов. При необходимости несложно расширить возможности расчетного модуля до большего количества элементов.
Для получения информации о новых статьях и для скачивания рабочих файлов программ прошу Вас подписаться на анонсы в окне, расположенном в конце каждой статьи или в окне вверху страницы.
Не забывайте подтвердить подписку кликом по ссылке в письме, которое тут же придет к вам на указанную почту (может прийти в папку « Спам» )!!!
С интересом прочту ваши комментарии, уважаемые читатели!!! Поделитесь своими мыслями!
Прошу уважающих труд автора скачивать файл с программой расчета после подписки на анонсы статей!